ವಾತಾವರಣ ಪತ್ತೆ ವಿಧಾನಗಳು
ವಾತಾವರಣ ಪತ್ತೆ ಮಾಡುವ ಮುಖ್ಯ ವಿಧಾನಗಳು: ಮೈಕ್ರೋವೇವ್ ರಾಡಾರ್ ಸೌಂಡಿಂಗ್ ವಿಧಾನ, ವಾಯುಗಾಮಿ ಅಥವಾ ರಾಕೆಟ್ ಸೌಂಡಿಂಗ್ ವಿಧಾನ, ಸೌಂಡಿಂಗ್ ಬಲೂನ್, ಉಪಗ್ರಹ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು LIDAR. ವಾತಾವರಣಕ್ಕೆ ಕಳುಹಿಸಲಾದ ಮೈಕ್ರೋವೇವ್ಗಳು ಮಿಲಿಮೀಟರ್ ಅಥವಾ ಸೆಂಟಿಮೀಟರ್ ಅಲೆಗಳಾಗಿರುವುದರಿಂದ ಮೈಕ್ರೋವೇವ್ ರಾಡಾರ್ ಸಣ್ಣ ಕಣಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಲು ಸಾಧ್ಯವಿಲ್ಲ, ಅವು ದೀರ್ಘ ತರಂಗಾಂತರಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ ಮತ್ತು ಸಣ್ಣ ಕಣಗಳೊಂದಿಗೆ, ವಿಶೇಷವಾಗಿ ವಿವಿಧ ಅಣುಗಳೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸಲು ಸಾಧ್ಯವಿಲ್ಲ.
ವಾಯುಗಾಮಿ ಮತ್ತು ರಾಕೆಟ್ ಧ್ವನಿ ವಿಧಾನಗಳು ಹೆಚ್ಚು ದುಬಾರಿಯಾಗಿದ್ದು, ದೀರ್ಘಕಾಲದವರೆಗೆ ಗಮನಿಸಲಾಗುವುದಿಲ್ಲ. ಬಲೂನ್ಗಳನ್ನು ಧ್ವನಿಸುವ ವೆಚ್ಚ ಕಡಿಮೆಯಿದ್ದರೂ, ಅವು ಗಾಳಿಯ ವೇಗದಿಂದ ಹೆಚ್ಚು ಪರಿಣಾಮ ಬೀರುತ್ತವೆ. ಉಪಗ್ರಹ ದೂರಸ್ಥ ಸಂವೇದನೆಯು ಆನ್-ಬೋರ್ಡ್ ರಾಡಾರ್ ಬಳಸಿ ಜಾಗತಿಕ ವಾತಾವರಣವನ್ನು ದೊಡ್ಡ ಪ್ರಮಾಣದಲ್ಲಿ ಪತ್ತೆ ಮಾಡುತ್ತದೆ, ಆದರೆ ಪ್ರಾದೇಶಿಕ ರೆಸಲ್ಯೂಶನ್ ತುಲನಾತ್ಮಕವಾಗಿ ಕಡಿಮೆಯಾಗಿದೆ. ವಾತಾವರಣಕ್ಕೆ ಲೇಸರ್ ಕಿರಣವನ್ನು ಹೊರಸೂಸುವ ಮೂಲಕ ಮತ್ತು ವಾತಾವರಣದ ಅಣುಗಳು ಅಥವಾ ಏರೋಸಾಲ್ಗಳು ಮತ್ತು ಲೇಸರ್ ನಡುವಿನ ಪರಸ್ಪರ ಕ್ರಿಯೆಯನ್ನು (ಚದುರುವಿಕೆ ಮತ್ತು ಹೀರಿಕೊಳ್ಳುವಿಕೆ) ಬಳಸಿಕೊಂಡು ವಾತಾವರಣದ ನಿಯತಾಂಕಗಳನ್ನು ಪಡೆಯಲು ಲಿಡಾರ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಲೇಸರ್ನ ಬಲವಾದ ದಿಕ್ಕು, ಕಡಿಮೆ ತರಂಗಾಂತರ (ಮೈಕ್ರಾನ್ ತರಂಗ) ಮತ್ತು ಕಿರಿದಾದ ಪಲ್ಸ್ ಅಗಲ ಮತ್ತು ಫೋಟೊಡೆಕ್ಟರ್ನ ಹೆಚ್ಚಿನ ಸಂವೇದನೆ (ಫೋಟೋಮಲ್ಟಿಪ್ಲೈಯರ್ ಟ್ಯೂಬ್, ಸಿಂಗಲ್ ಫೋಟಾನ್ ಡಿಟೆಕ್ಟರ್) ಕಾರಣದಿಂದಾಗಿ, ಲಿಡಾರ್ ವಾತಾವರಣದ ನಿಯತಾಂಕಗಳ ಹೆಚ್ಚಿನ ನಿಖರತೆ ಮತ್ತು ಹೆಚ್ಚಿನ ಪ್ರಾದೇಶಿಕ ಮತ್ತು ತಾತ್ಕಾಲಿಕ ರೆಸಲ್ಯೂಶನ್ ಪತ್ತೆಯನ್ನು ಸಾಧಿಸಬಹುದು. ಅದರ ಹೆಚ್ಚಿನ ನಿಖರತೆ, ಹೆಚ್ಚಿನ ಪ್ರಾದೇಶಿಕ ಮತ್ತು ತಾತ್ಕಾಲಿಕ ರೆಸಲ್ಯೂಶನ್ ಮತ್ತು ನಿರಂತರ ಮೇಲ್ವಿಚಾರಣೆಯಿಂದಾಗಿ, ವಾತಾವರಣದ ಏರೋಸಾಲ್ಗಳು, ಮೋಡಗಳು, ವಾಯು ಮಾಲಿನ್ಯಕಾರಕಗಳು, ವಾತಾವರಣದ ತಾಪಮಾನ ಮತ್ತು ಗಾಳಿಯ ವೇಗವನ್ನು ಪತ್ತೆಹಚ್ಚುವಲ್ಲಿ LIDAR ವೇಗವಾಗಿ ಅಭಿವೃದ್ಧಿ ಹೊಂದುತ್ತಿದೆ.
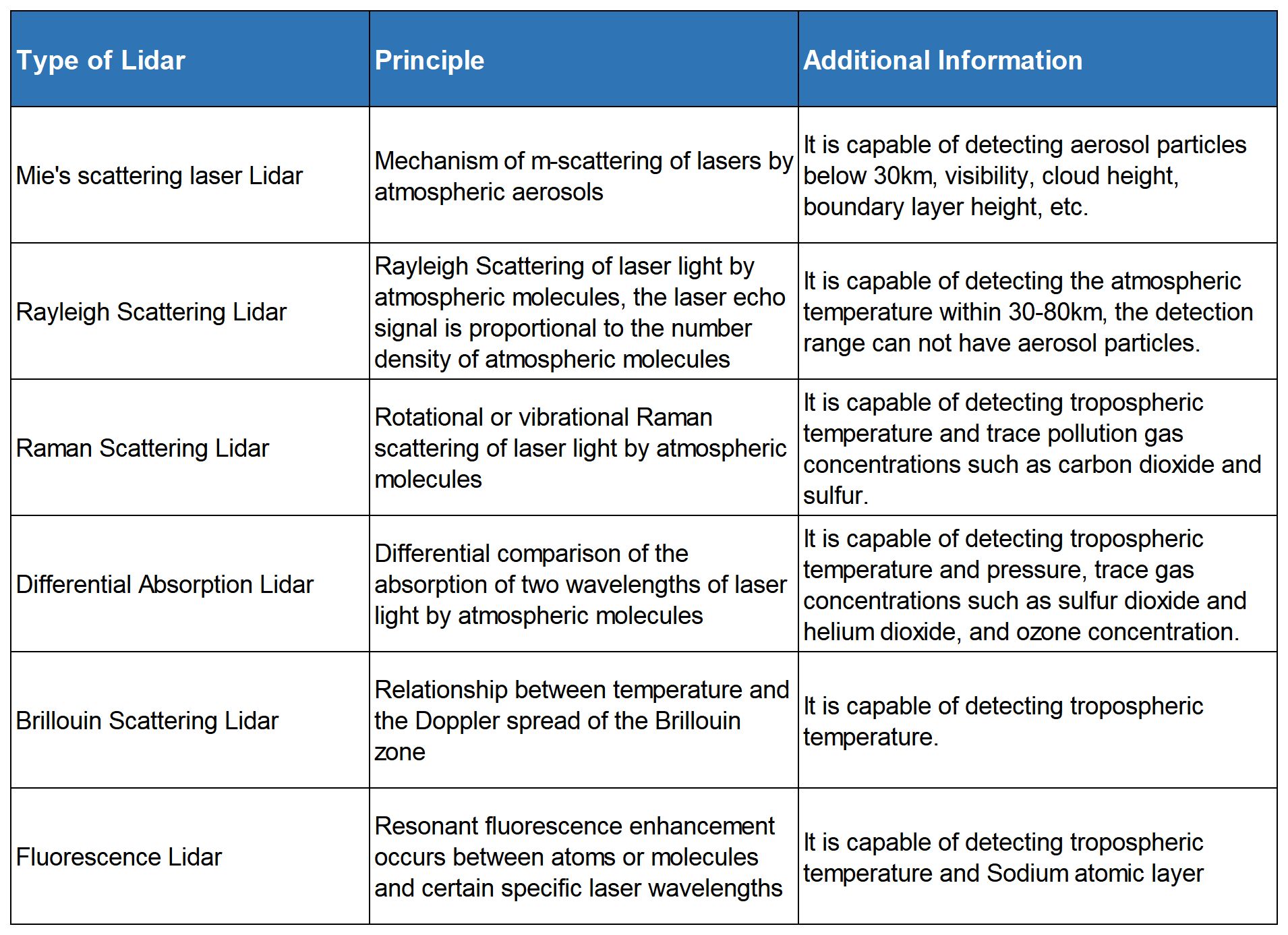
ಲಿಡಾರ್ ಪ್ರಕಾರಗಳನ್ನು ಈ ಕೆಳಗಿನ ಕೋಷ್ಟಕದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ:
ವಾತಾವರಣ ಪತ್ತೆ ವಿಧಾನಗಳು
ವಾತಾವರಣ ಪತ್ತೆ ಮಾಡುವ ಮುಖ್ಯ ವಿಧಾನಗಳು: ಮೈಕ್ರೋವೇವ್ ರಾಡಾರ್ ಸೌಂಡಿಂಗ್ ವಿಧಾನ, ವಾಯುಗಾಮಿ ಅಥವಾ ರಾಕೆಟ್ ಸೌಂಡಿಂಗ್ ವಿಧಾನ, ಸೌಂಡಿಂಗ್ ಬಲೂನ್, ಉಪಗ್ರಹ ರಿಮೋಟ್ ಸೆನ್ಸಿಂಗ್ ಮತ್ತು LIDAR. ವಾತಾವರಣಕ್ಕೆ ಕಳುಹಿಸಲಾದ ಮೈಕ್ರೋವೇವ್ಗಳು ಮಿಲಿಮೀಟರ್ ಅಥವಾ ಸೆಂಟಿಮೀಟರ್ ಅಲೆಗಳಾಗಿರುವುದರಿಂದ ಮೈಕ್ರೋವೇವ್ ರಾಡಾರ್ ಸಣ್ಣ ಕಣಗಳನ್ನು ಪತ್ತೆಹಚ್ಚಲು ಸಾಧ್ಯವಿಲ್ಲ, ಅವು ದೀರ್ಘ ತರಂಗಾಂತರಗಳನ್ನು ಹೊಂದಿರುತ್ತವೆ ಮತ್ತು ಸಣ್ಣ ಕಣಗಳೊಂದಿಗೆ, ವಿಶೇಷವಾಗಿ ವಿವಿಧ ಅಣುಗಳೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸಲು ಸಾಧ್ಯವಿಲ್ಲ.
ವಾಯುಗಾಮಿ ಮತ್ತು ರಾಕೆಟ್ ಧ್ವನಿ ವಿಧಾನಗಳು ಹೆಚ್ಚು ದುಬಾರಿಯಾಗಿದ್ದು, ದೀರ್ಘಕಾಲದವರೆಗೆ ಗಮನಿಸಲಾಗುವುದಿಲ್ಲ. ಬಲೂನ್ಗಳನ್ನು ಧ್ವನಿಸುವ ವೆಚ್ಚ ಕಡಿಮೆಯಿದ್ದರೂ, ಅವು ಗಾಳಿಯ ವೇಗದಿಂದ ಹೆಚ್ಚು ಪರಿಣಾಮ ಬೀರುತ್ತವೆ. ಉಪಗ್ರಹ ದೂರಸ್ಥ ಸಂವೇದನೆಯು ಆನ್-ಬೋರ್ಡ್ ರಾಡಾರ್ ಬಳಸಿ ಜಾಗತಿಕ ವಾತಾವರಣವನ್ನು ದೊಡ್ಡ ಪ್ರಮಾಣದಲ್ಲಿ ಪತ್ತೆ ಮಾಡುತ್ತದೆ, ಆದರೆ ಪ್ರಾದೇಶಿಕ ರೆಸಲ್ಯೂಶನ್ ತುಲನಾತ್ಮಕವಾಗಿ ಕಡಿಮೆಯಾಗಿದೆ. ವಾತಾವರಣಕ್ಕೆ ಲೇಸರ್ ಕಿರಣವನ್ನು ಹೊರಸೂಸುವ ಮೂಲಕ ಮತ್ತು ವಾತಾವರಣದ ಅಣುಗಳು ಅಥವಾ ಏರೋಸಾಲ್ಗಳು ಮತ್ತು ಲೇಸರ್ ನಡುವಿನ ಪರಸ್ಪರ ಕ್ರಿಯೆಯನ್ನು (ಚದುರುವಿಕೆ ಮತ್ತು ಹೀರಿಕೊಳ್ಳುವಿಕೆ) ಬಳಸಿಕೊಂಡು ವಾತಾವರಣದ ನಿಯತಾಂಕಗಳನ್ನು ಪಡೆಯಲು ಲಿಡಾರ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಲೇಸರ್ನ ಬಲವಾದ ದಿಕ್ಕು, ಕಡಿಮೆ ತರಂಗಾಂತರ (ಮೈಕ್ರಾನ್ ತರಂಗ) ಮತ್ತು ಕಿರಿದಾದ ಪಲ್ಸ್ ಅಗಲ ಮತ್ತು ಫೋಟೊಡೆಕ್ಟರ್ನ ಹೆಚ್ಚಿನ ಸಂವೇದನೆ (ಫೋಟೋಮಲ್ಟಿಪ್ಲೈಯರ್ ಟ್ಯೂಬ್, ಸಿಂಗಲ್ ಫೋಟಾನ್ ಡಿಟೆಕ್ಟರ್) ಕಾರಣದಿಂದಾಗಿ, ಲಿಡಾರ್ ವಾತಾವರಣದ ನಿಯತಾಂಕಗಳ ಹೆಚ್ಚಿನ ನಿಖರತೆ ಮತ್ತು ಹೆಚ್ಚಿನ ಪ್ರಾದೇಶಿಕ ಮತ್ತು ತಾತ್ಕಾಲಿಕ ರೆಸಲ್ಯೂಶನ್ ಪತ್ತೆಯನ್ನು ಸಾಧಿಸಬಹುದು. ಅದರ ಹೆಚ್ಚಿನ ನಿಖರತೆ, ಹೆಚ್ಚಿನ ಪ್ರಾದೇಶಿಕ ಮತ್ತು ತಾತ್ಕಾಲಿಕ ರೆಸಲ್ಯೂಶನ್ ಮತ್ತು ನಿರಂತರ ಮೇಲ್ವಿಚಾರಣೆಯಿಂದಾಗಿ, ವಾತಾವರಣದ ಏರೋಸಾಲ್ಗಳು, ಮೋಡಗಳು, ವಾಯು ಮಾಲಿನ್ಯಕಾರಕಗಳು, ವಾತಾವರಣದ ತಾಪಮಾನ ಮತ್ತು ಗಾಳಿಯ ವೇಗವನ್ನು ಪತ್ತೆಹಚ್ಚುವಲ್ಲಿ LIDAR ವೇಗವಾಗಿ ಅಭಿವೃದ್ಧಿ ಹೊಂದುತ್ತಿದೆ.
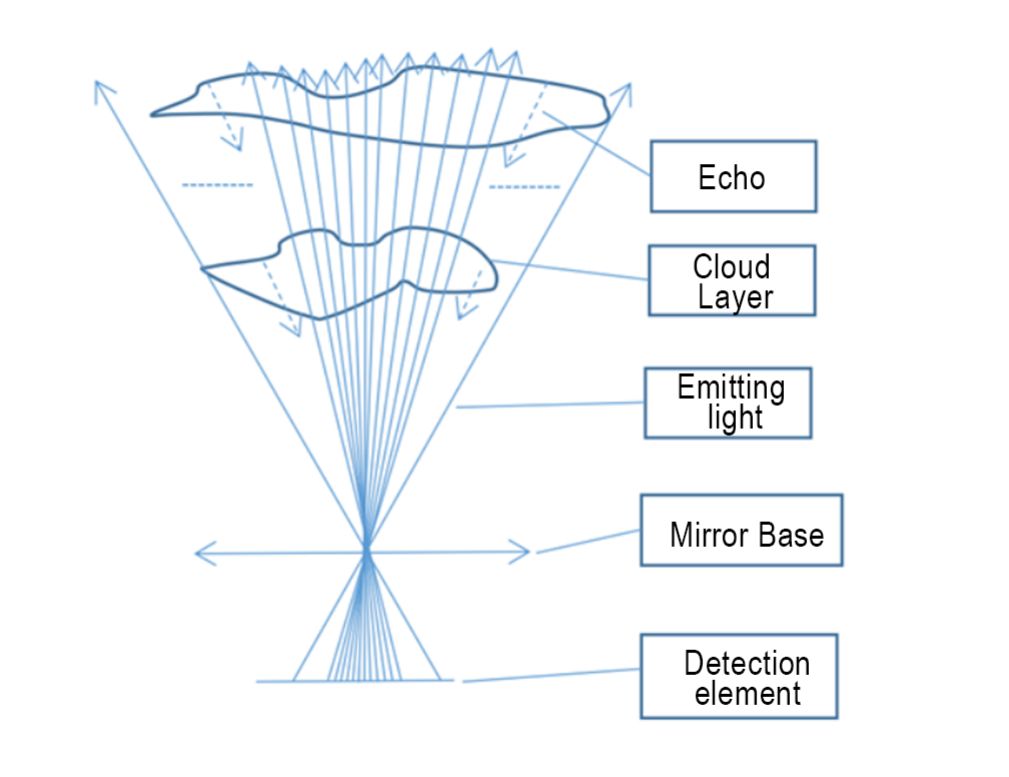
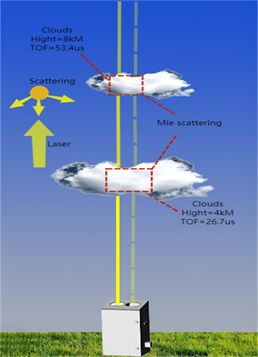
ಮೋಡ ಮಾಪನ ರಾಡಾರ್ ತತ್ವದ ಸ್ಕೀಮ್ಯಾಟಿಕ್ ರೇಖಾಚಿತ್ರ
ಮೋಡ ಪದರ: ಗಾಳಿಯಲ್ಲಿ ತೇಲುತ್ತಿರುವ ಮೋಡದ ಪದರ; ಹೊರಸೂಸುವ ಬೆಳಕು: ನಿರ್ದಿಷ್ಟ ತರಂಗಾಂತರದ ಕೊಲಿಮೇಟೆಡ್ ಕಿರಣ; ಪ್ರತಿಧ್ವನಿ: ಹೊರಸೂಸುವಿಕೆಯು ಮೋಡದ ಪದರದ ಮೂಲಕ ಹಾದುಹೋದ ನಂತರ ಉತ್ಪತ್ತಿಯಾಗುವ ಬ್ಯಾಕ್ಸ್ಕ್ಯಾಟರ್ಡ್ ಸಿಗ್ನಲ್; ಕನ್ನಡಿ ಬೇಸ್: ದೂರದರ್ಶಕ ವ್ಯವಸ್ಥೆಯ ಸಮಾನ ಮೇಲ್ಮೈ; ಪತ್ತೆ ಅಂಶ: ದುರ್ಬಲ ಪ್ರತಿಧ್ವನಿ ಸಂಕೇತವನ್ನು ಸ್ವೀಕರಿಸಲು ಬಳಸುವ ದ್ಯುತಿವಿದ್ಯುತ್ ಸಾಧನ.
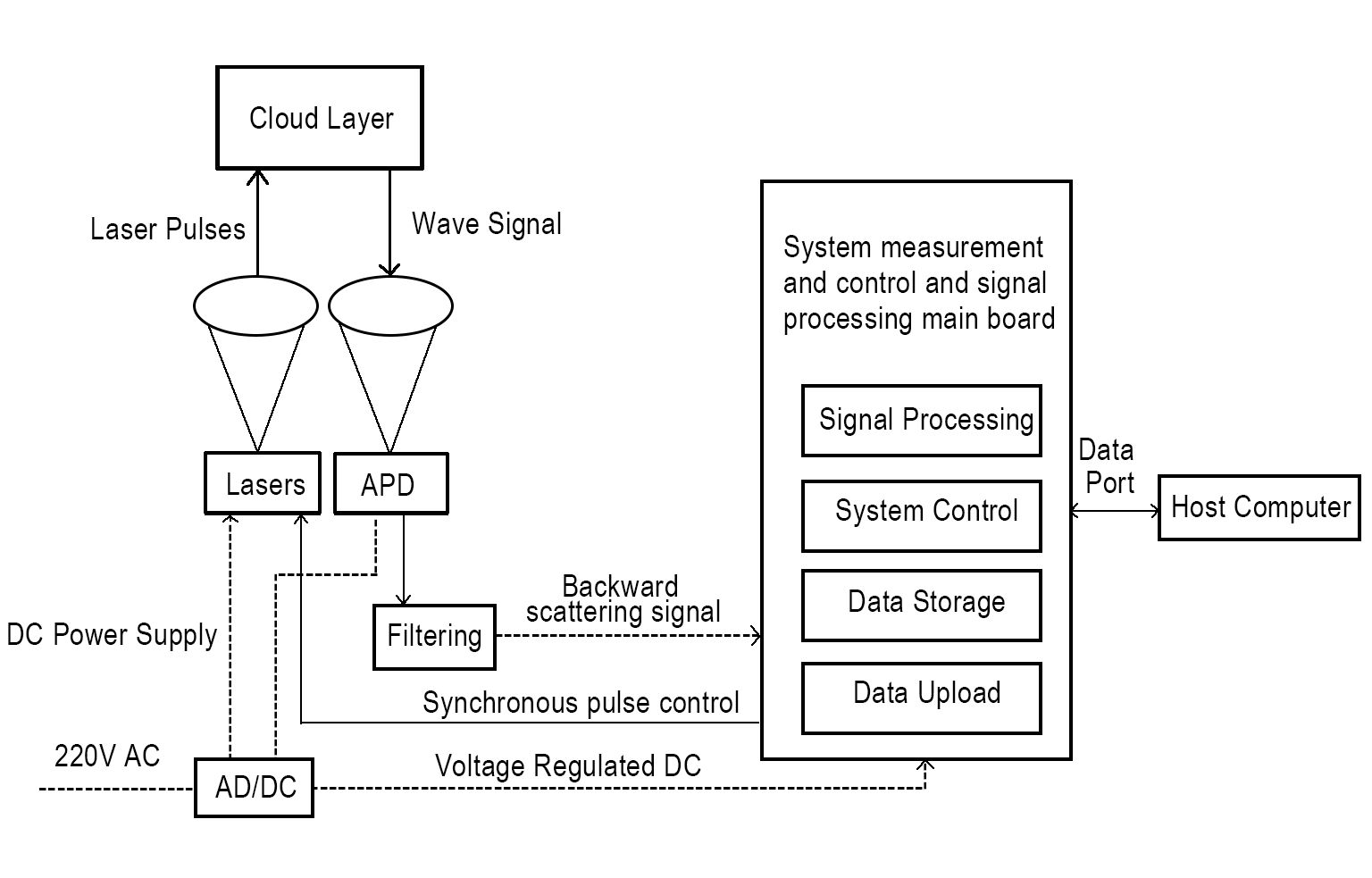
ಮೋಡ ಮಾಪನ ರಾಡಾರ್ ವ್ಯವಸ್ಥೆಯ ಕಾರ್ಯ ಚೌಕಟ್ಟು
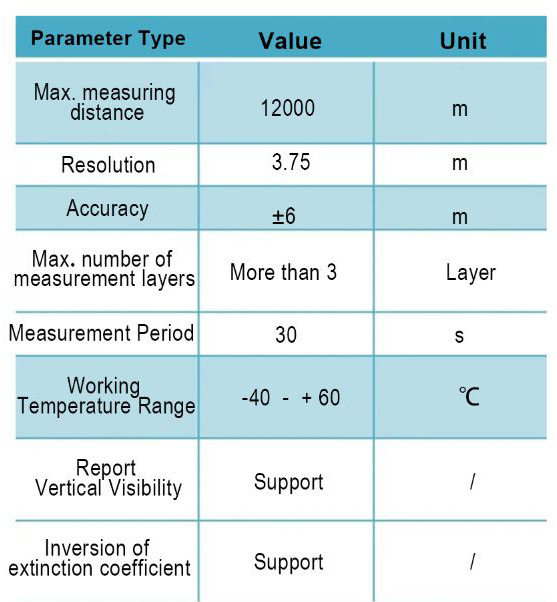
ಲುಮಿಸ್ಪಾಟ್ ಟೆಕ್ ಮೋಡದ ಮಾಪನ ಲಿಡಾರ್ನ ಮುಖ್ಯ ತಾಂತ್ರಿಕ ನಿಯತಾಂಕಗಳು
ಉತ್ಪನ್ನದ ಚಿತ್ರ

ಅಪ್ಲಿಕೇಶನ್

ಉತ್ಪನ್ನಗಳ ಕಾರ್ಯ ಸ್ಥಿತಿ ರೇಖಾಚಿತ್ರ
ಪೋಸ್ಟ್ ಸಮಯ: ಮೇ-09-2023